
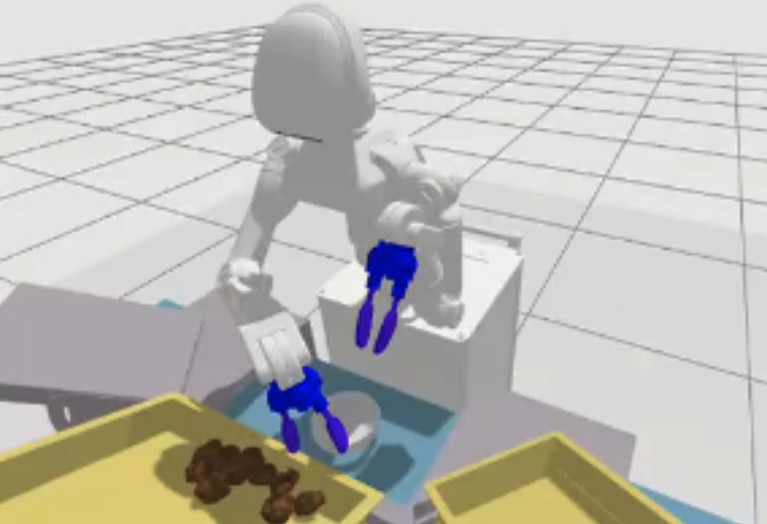

 In this post, we implement tests for a Unitree Go2 robot controlled by an RL policy to execute waypoint missions.
In this post, we implement tests for a Unitree Go2 robot controlled by an RL policy to execute waypoint missions.
Articles by artefacts

最先端の開発ツールをロボット工学にもたらす
テスト、継続的インテグレーション、シミュレーションにより、ソフトウェアとロボット工学におけるより速い開発サイクルとリグレッションのリスク低減が可能になります。Artefactsは、変更を加えるたびにロボットコードをテスト・シミュレーションし、開発パフォーマンスを経時的に簡単に監視できるように特別に設計されたクラウドベースのプラットフォームを提供します。これにより、問題を早期に発見し、開発サイクルを短縮し、設計を検証するための物理的ロボットへの依存を減らすことでコスト削減が可能になります。即時の継続的シミュレーションと継続的テスト
Artefactsは、ロボティクスプロジェクト向けのシミュレーションベースのテスト設定をガイドします。当社のテストライブラリは簡単に始められます。すべてのライブラリはROS 2プロジェクトとシームレスに統合され、あらゆるフレームワークで動作します。
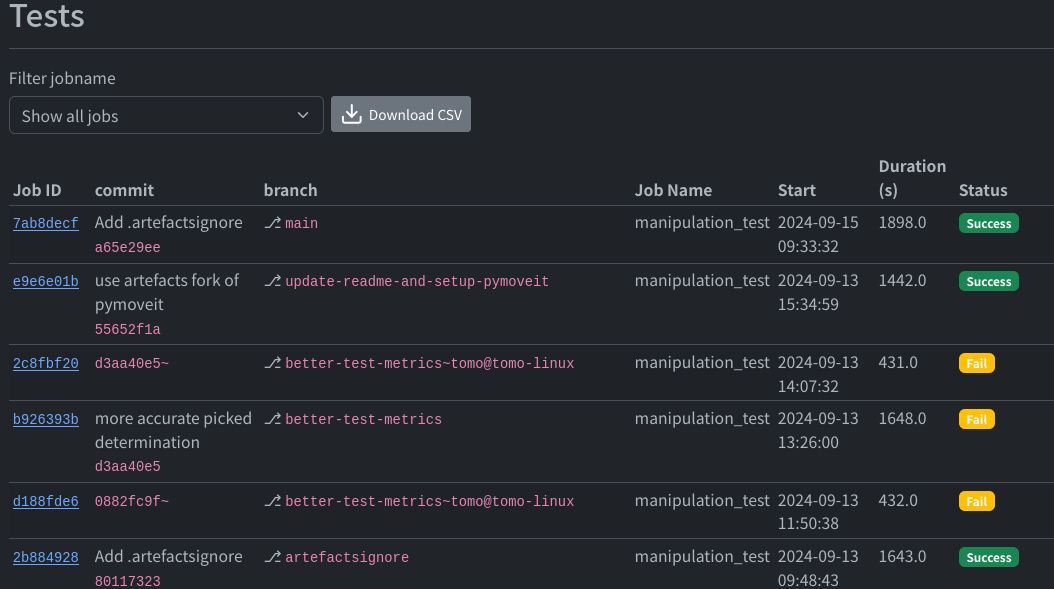
テスト結果を追跡
どのパラメータで何が問題だったかを手動で追跡する必要はもうありません。すべてが記録され、リグレッション分析とチームディスカッションをサポートします。問題を迅速に解決する
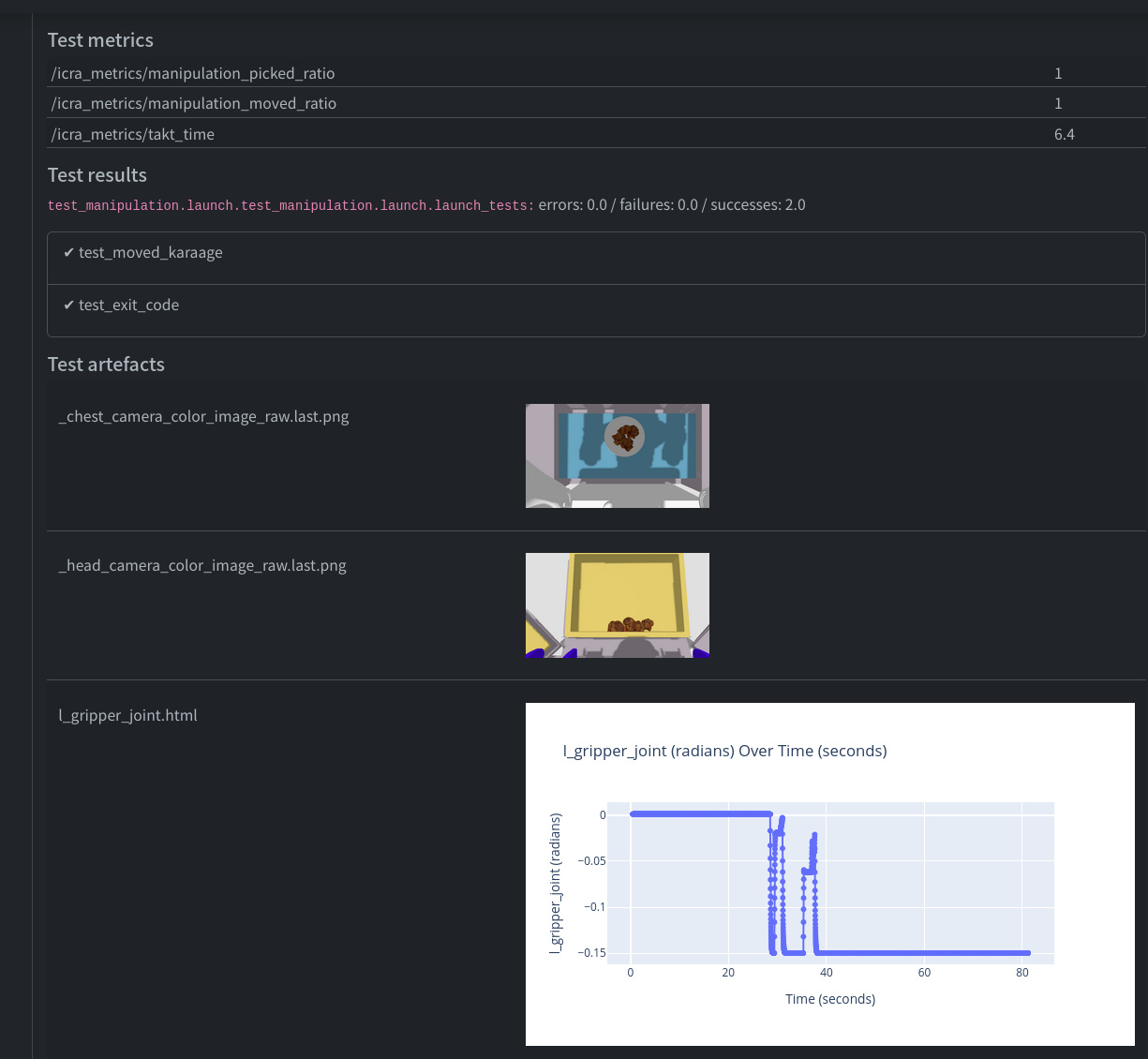
コンテキストを提供するための追加テスト出力を含めることができます
- メトリクス:タクトタイムなどのアプリケーションパフォーマンスを報告
- チャート:時間の経過に伴うシミュレーションとロボットの状態を視覚化
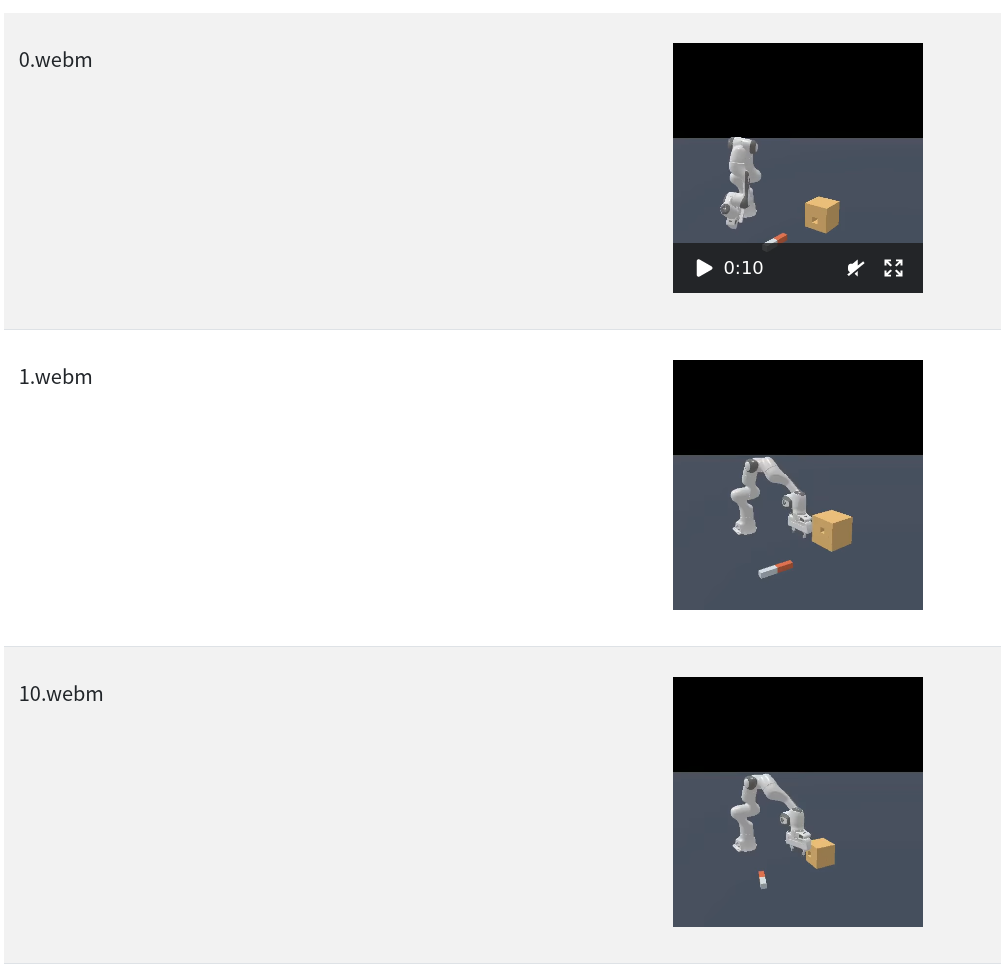
- ビデオ:何が起きたかを素早く確認
- Rosbag:詳細な分析のため
- 開発者マシンに縛られる必要はありません。インフラストラクチャは当社がケアします
- コマンドラインから実行するか、GitHubリポジトリをリンクして自動的に実行
- テストを並行して実行し、多くのパラメータバリエーションを試すことで、アプリケーションの堅牢性に関する洞察を得られます
パラメータ化されたテストがクラウドで簡単にスケール
継続的インテグレーションパイプラインと統合
- ワークフロー構成にArtefacts Github Actionを追加
-
READMEにステータスバッジでテストの健全性を表示Artefacts CI - nav2 (main)passing
- uses: art-e-fact/action-artefacts-ci@main
with:
artefacts-api-key: $
job-name: test_manipulation